고정 헤더 영역
상세 컨텐츠
본문
-Observation

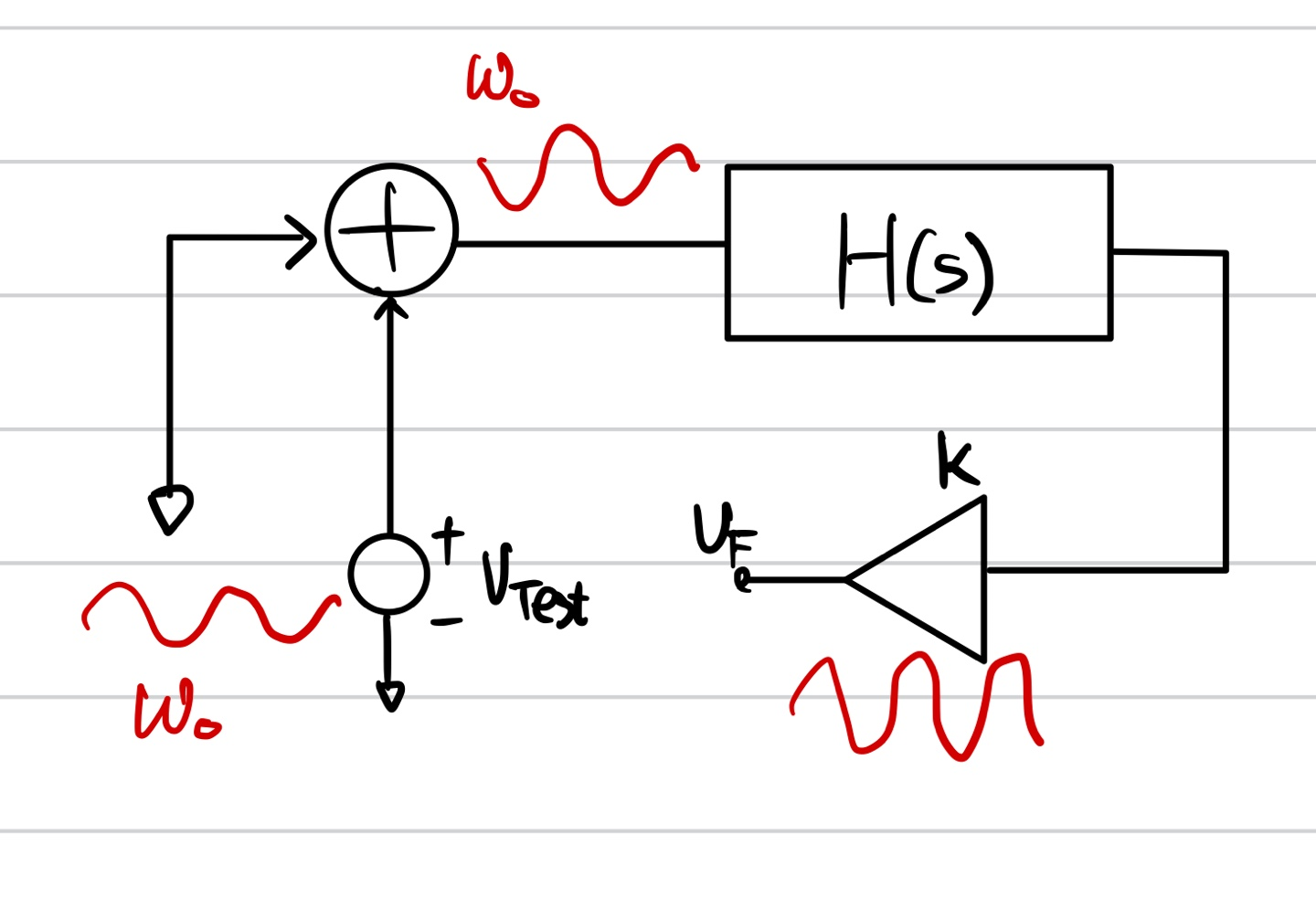
우선 위와 같이 기존의 Feedback system을 생각해보자. 여기서 Loop Gain을 구하기 위해서 Loop Break를 해주자. 어차피 경향성 파악을 위함임으로 복제하지 않고 그냥 Break 하였다.

Vtest sinusoidal하다고 가정해보자. 이때 A1의 input에서는 부호가 반대로 나타나게 되고 A1에 의해 증폭되어 Vf에는 Vtest와 부호가 반대로 나오게 된다. 즉 Vf opposes Vtest. 이것이 지금까지 우리가 배운 Negative feedback system이다. 이를 시간에 대해서 나타내면 아래와 같다.

Quiz) Redraw if A1 has some delay(~phase shift)

Delay가 존재하게 되면 파란색과 같이 살짝 옆으로 이동한 형태로 나타나게 된다. 이번에는 some delay가 아니라 half cycle delay가 있다면 아래와 같을 것이다.

이렇게 되면 Vf enhances Vtest가 된다. 즉 positive feedback이 됨을 의미한다.
Analysis for Instability

기본적인 feedback system은 위와 같다. 이때 Closed Loop Gain은 위와 같다. 여기서 K에서는 pole과 zero와 같이 phase shift(delay)를 발생시키는 요소가 없고 H(s)에서만 존재한다고 가정하자. 이때 X에 sinusoidal 한 frequency가 Wo인 신호를 넣어주었다. 이렇게 되면 gain의 값은 아래와 같다.

여기서 K*H(j*wo)의 값이 -1이되면 어떻게 될까?
분모가 0이 됨으로 Y/X가 무한대로 발산할 것이다. 즉 이것이 Unstable Loop이다.
이러한 unstable loop는 Oscillator를 만들기에는 좋다. 하지만 지금까지 배운 amplifier를 만들기에는 안 좋다. 왜냐하면 일정한 Gain이 유지되는 것이 아닌 거의 극한의 값이 나타날 것이기 때문이다.
A Closer Look
If K*H(j*Wo)=-1 then Loop is unstable
To Avoid instability, we need to ensure that K*H(j*Wo)!=-1 for any w.
Loop Gain에 해당하는 값이 -1이 되면 unstable함으로 이를 생각했을 때 아래의 조건을 만족하게 된다면 unstable 하다고 말할 수 있다.

Try the Loop Gain Test
이전에 배운것과 같이 Loop Break를 해주고 Vtest를 연결해주었다. 이때 Vtest가 frequency Wo인 신호라고 가정해보자. 이때 K*H(j*Wo)=-1이라고 하면 결과적으로 Vf에서 Vtest를 enhance 하는 신호로 나오게 된다. 즉 Vf/Vtest>0 임으로 positive feedback이 되고 이는 계속 값이 누적되면서 output이 발산하게 된다.
Examine Closed Loop System in the Time Domain
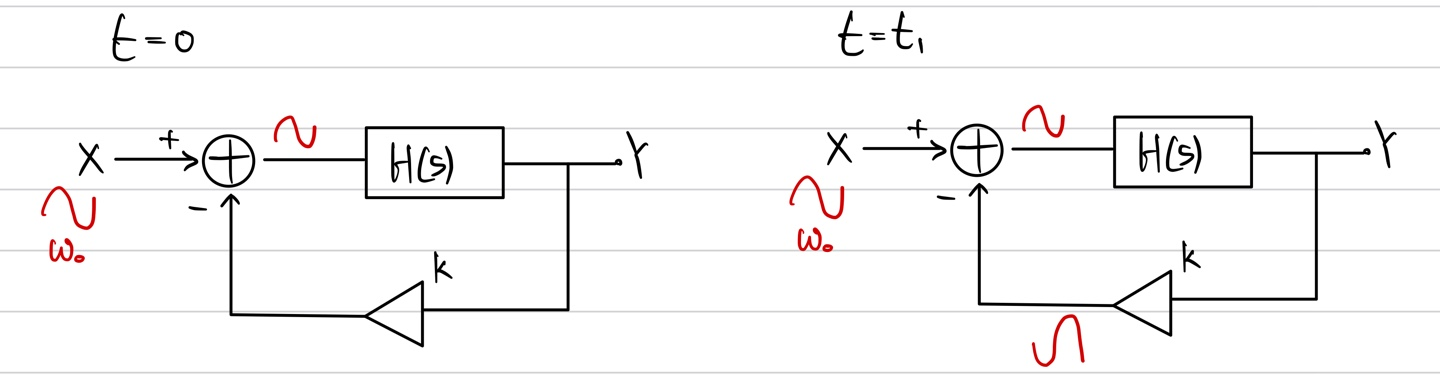
T=0 일때는 아직 H(s)를 들어가지 않은 상태이다. 이제 t1이 되면 H(s)를 거치게 되는데 이때 K*H(s)=-1 임으로 기존의 X와 반대로 나타나게 된다. 하지만 subtract 하게 되면 결국 X를 enhance 하는 것과 같으므로 아래와 같게 된다.

즉 half cycle 정도 delay가 발생하게 되면서 기존의 input에 같은 값을 더해주게 되고 이렇게 되면 일정한 값이 아닌 발산하는 값이 나옴으로 unstable하게 된다. 그리고 이러한 unstable은 oscillator를 만드는데 이용이 된다.
Review Bode's Law

우리가 기본적으로 알고 있는 Bode's Law는 Pole은 -20db/dec만큼 값을 낮추고 Zero에서는 +20db/dec만큼 값을 올린다. 이는 magnitude에서 관점이고 phase에서 살펴보면 아래와 같다.

Pole은 phase를 -45도 변화를 시킨다. 이때 약0.1pole frequency에서 변화가 시작되고 1*pole frequency에서 -45도가 된다. 그리고 약 10*pole frequency에서 -90도가 된다. Zero는 phase를 +45도 증가시킨다. 0.1*Zero frequency에서 변화가 시작되고 1*Zero frequency에서 +45도를 더해주게 된다. 그리고 10*zero frequency에서 약 +90도가 된다.
V/R
윤.
'윤. 전기전자 > Instability in Feedback' 카테고리의 다른 글
| Lecture 44. Bode's Rule, Stability Condition, Circuit example (0) | 2021.08.23 |
|---|




댓글 영역