고정 헤더 영역
상세 컨텐츠
본문
제어공학을 수강하면서 가장 헷갈리고 복잡했던것이 바로 응답에 대한 그래프를 그리는 것이었다.
일단 근 궤적도 ( root locus )를 그릴때는 정해진 과정이 너무 많았고, 식이 조금만 복잡해져도 break out point를
구하려고 미분하는것이 매우 힘들어 지는 경우가 많았다.
그리고 손으로는 정확히 그리기 힘든 경우도 많았다.
그리고 진동응답에서 bode plot을 그리고 phase diagram을 그릴때는 정말 너무 헷갈렸다.
그러나 이런 그래프를 매트랩은 정말 쉽게 그려준다.
1. 근 궤적도 root locus
게인 값이 정해져 있을경우 pole의 위치를 확인하는데 사용할 수 있다

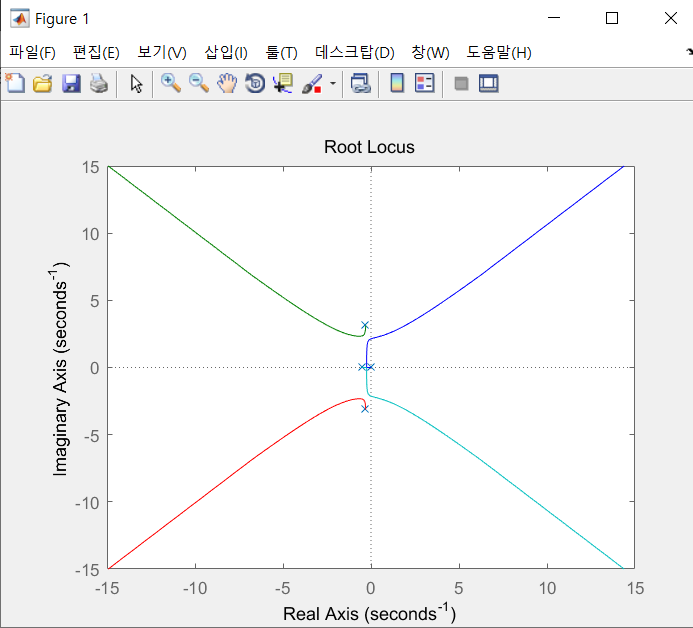
그러나 대부분의 경우 root locus는 게인 값의 변화에 따라 근의 궤적을 확인할때 많이 사용한다
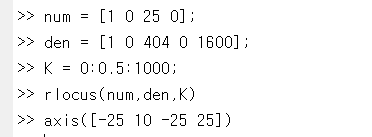
G*H = K*(s3+25s)/(s4 + 40s2 + 1600)
K = 0~1000까지 변할때의 근궤적을 그려보자.

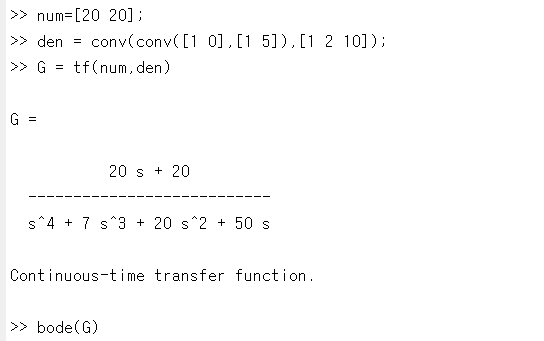
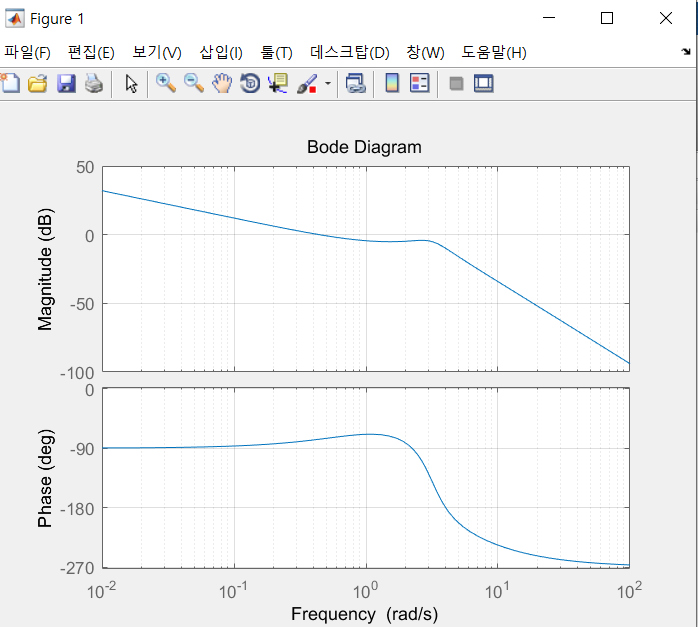
Bode 선도
진동응답과 위상각을 그려주는 bode 선도를 한번 살펴보도록 하자.
근궤적도 함수와 같이 정말 간단한 명령어 한줄로 그림을 그릴 수 있다.
이때 함수는
G = (20(s+1))/(s(s+5)(s2+2s+10) 이라고 하자
계산을 위해서 먼저 conv를 해주어야한다.
그리고 더욱 간편한 기능은
phase margin 과 magnitude margin을 계산해 주는 명령어도 있다는 것이다
margin(함수) 를 사용하면 된다

이렇게 간단하게 제어를 위해 필요한 함수들을 알아보았다. 정말 기본적인것들만 알아보았는데, 제어를 위한 프로그램
코딩은 지금까지 배운 명령어와 함수를 이용하면 어렵지 않게 할 수 있을것이라고 생각한다!!
'장.Matlab > Control Engineering' 카테고리의 다른 글
| 제어공학 4 - 시스템의 응답 (0) | 2021.02.21 |
|---|---|
| 제어공학 3 - 블록 선도 (0) | 2021.02.21 |
| 제어공학 2 - 전달함수 , 상태함수 (0) | 2021.02.21 |
| 제어공학 1 - 변환 (0) | 2021.02.21 |




댓글 영역